Forschungsprojekt BikeAssist – Querstabilisierung elektrisch unterstützter Fahrräder bei niedrigen Geschwindigkeiten.
News

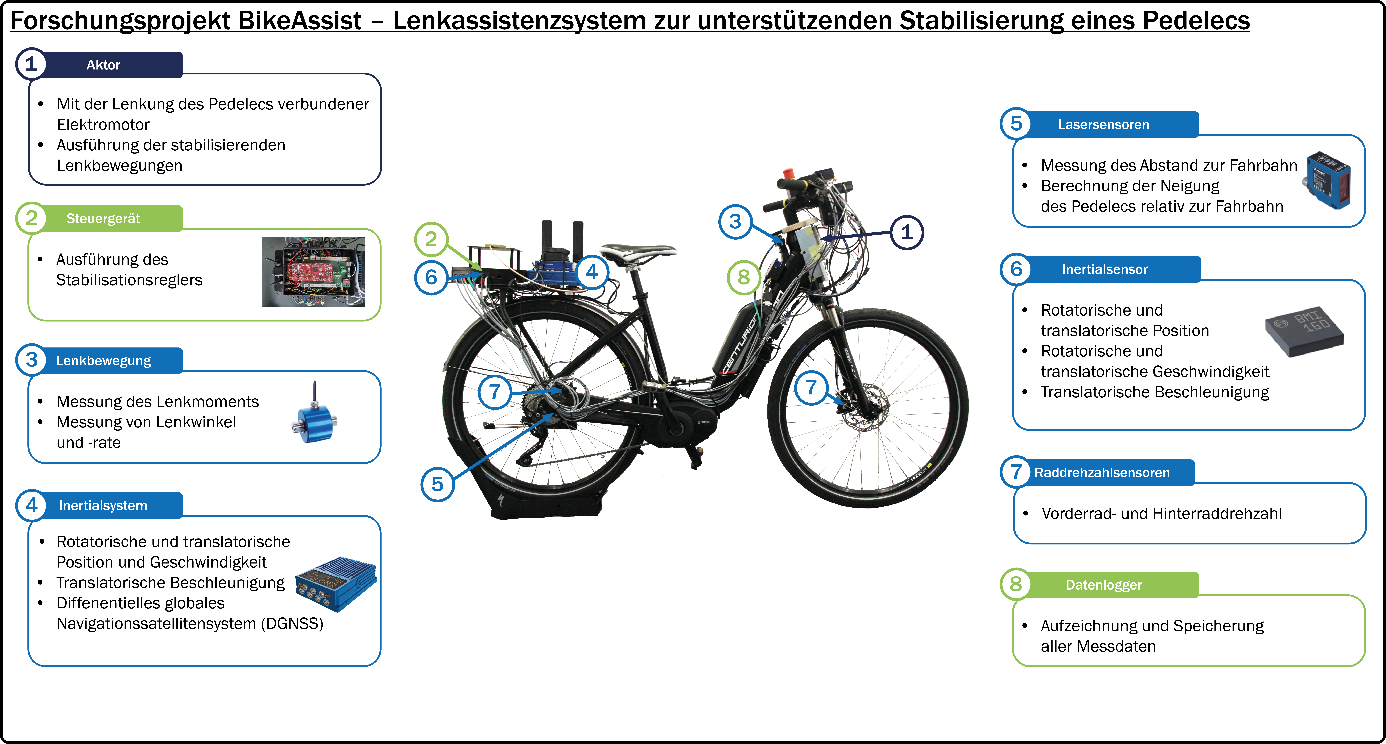
Das mit dem Assistenzsystem ausgestattete Versuchsträger Pedelec. Deutlich erkennbar ist der am Steuerrohr des Pedelecs angebrachte Elektromotor, der den Radfahrenden mit kleinen Lenkbewegungen beim Stabilisieren (also dem Gleichgewichthalten) des Pedelecs unterstützt.
Während das Fahrradfahren bei mittleren Geschwindigkeiten von den meisten Menschen problemlos beherrscht wird, ist das Gleichgewichthalten und das präzise Kurshalten bei langsamer Fahrt besonders für weniger geübte Radfahrerinnen und Radfahrer und für viele ältere Menschen eine anspruchsvolle Fahraufgabe. Verantwortlich dafür ist die Physik des Fahrradfahrens: Bei höheren Geschwindigkeiten kann sich ein Fahrrad durch physikalische Effekte selbst stabilisieren. Bei niedrigen Geschwindigkeiten ist der Einfluss dieser Effekte gering und der Radfahrender muss selbst dafür sorgen, sich und das Fahrrad im Gleichgewicht zu halten. Hierfür stehen dem Radfahrenden zwei Möglichkeiten zur Verfügung: Er kann durch Bein- oder Oberkörperbewegungen sein Gewicht verlagern oder er führt stabilisierende Lenkbewegungen durch. Beide Stabilisierungsmöglichkeiten nimmt der Radfahrende zumeist intuitiv vor, trotzdem erfordert sie Übung und motorische Fähigkeiten. Die Stabilisierung des Fahrrads kann damit Radfahrenden unterschiedlich gut gelingen, im Extremfall führt ein Defizit jedoch zum Sturz. Körperliche Einschränkungen können diese Stabilisierungsfähigkeit beeinträchtigen.
Im dem vom Bundesministerium für Bildung und Forschung im Rahmen des Programms „Förderprogramm Forschung an Fachhochschulen“ geförderten Forschungsprojekt BikeAssist der Hochschule Pforzheim wurde ein Assistenzsystem entwickelt, das den Radfahrenden bei seiner Aufgabe, das Fahrrad im Gleichgewicht zu halten, unterstützt.
Das für ein Pedelec konzipierte Assistenzsystem erzeugt ein begrenztes zusätzliches Lenkmoment, welches sich stabilisierend auf das Pedelec auswirken. Zusammen mit den Stabilisierungsbewegungen des Radfahrers lässt sich so ein Pedelec auch bei niedrigen Geschwindigkeiten einfach im Gleichgewicht halten. Kern des Assistenzsystems ist ein im Forschungsprojekt BikeAssist entwickelter Stabilisationsregler, der anhand kontinuierlicher Messungen der Stabilität des Pedelecs eine Stellgröße zur Ansteuerung eines Elektromotors erzeugt, der mit der Lenkung des Pedelecs verbunden ist.
Zur Entwicklung des Stabilisationsreglers wurde im Forschungsprojekt BikeAssist die Stabilisierung von Fahrrädern bzw. Pedelecs sowohl praktisch in Testfahrten, durchgeführt mit einem mit Messtechnik ausgestatteten Pedelec, als auch mathematisch durch Simulationsmodelle untersucht. Unter anderem wurde mit der Unterstützung von studentischen Bachelor- und Masterthesen ein Mehrkörpersimulationsmodell entwickelt, welches neben der Fahrdynamik von Fahrrädern auch den Radfahrenden und dessen Einfluss auf das Fahrrad modelliert.
 Pedelec-Versuchsträger
Pedelec-VersuchsträgerWährend mit dem Simulationsmodell bereits die Funktion des Assistenzsystem und der stabilisierenden Lenkeingriffe gezeigt werden kann, erfolgte im Rahmen des Forschungsprojekt BikeAssist auch ein experimenteller Funktionsnachweis. Dazu wurde das Assistenzsystem prototypisch an einem eigens dafür konzipierten Versuchsträger-Pedelec umgesetzt. Neben dem Elektromotor zur Erzeugung des Lenkeingriffs ist das Pedelec mit diversen Sensoren zur Erfassung der Stabilität des Pedelecs sowie einem Steuergerät für die Ausführung des Stabilisationsreglers ausgestattet.
In einer mit 60 Radfahrerinnen und Radfahrern durchgeführten Probandenstudie wurde die Funktion des Assistenzsystems bestätigt: Durch die gezielten Lenkeingriffe fuhren die Probanden mit aktivem Lenkassistenzsystem messbar stabiler als bei Vergleichsfahrten ohne die Lenkeingriffe des Assistenzsystems.
Das Forschungsprojekt BikeAssist zeigt damit die prinzipielle Anwendbarkeit eines Lenkassistenzsystems zur unterstützenden Stabilisierung eines Pedelecs bei niedrigen Geschwindigkeiten.
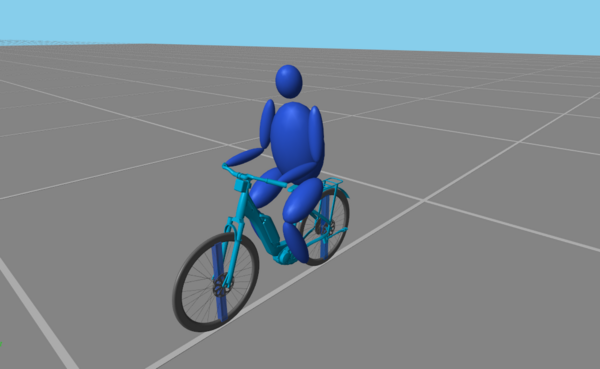 Visualisierung des im Forschungsprojekt BikeAssist entwickelten Mehrkörpersimulationsmodell von Fahrrad und Radfahrendem. Mit diesem lässt sich die Stabilisierung von Fahrrädern bzw. Pedelecs sowie der Einfluss des Radfahrenden darstellen. Anhand des Modells wurde der für das Assistenzsystem wichtige Stabilisationsregler ausgelegt
Visualisierung des im Forschungsprojekt BikeAssist entwickelten Mehrkörpersimulationsmodell von Fahrrad und Radfahrendem. Mit diesem lässt sich die Stabilisierung von Fahrrädern bzw. Pedelecs sowie der Einfluss des Radfahrenden darstellen. Anhand des Modells wurde der für das Assistenzsystem wichtige Stabilisationsregler ausgelegt